This program interactively makes irregular two-dimensional shapes that function together as gears. Click in the gray square to start.
In June of 2013, I saw How To Make Organically-Shaped Gears, a 2010 video by Clayton Boyer, a totally awesome maker of elaborate wooden clocks, which shows a fairly general method for constructing a gear to mesh with another gear whose form is nearly arbitrary. Boyer uses two existing spur gears with the desired gear ratio (which probably needs to be fairly simple, like 1:1, 1:2, 2:3, or something like that, not 7:8 or 23:29), tapes a paper disc on top of one, and affixes the arbitrary shape to the other one. Then he rotates the two gears together, marking out the places where the arbitrary shape overlaps the paper disc; the remaining places, where it does not overlap, form the shape of the other gear.
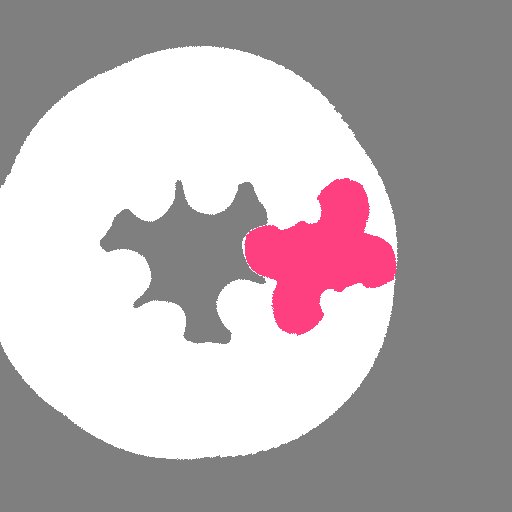
That’s the basic thing this program does. You draw a red “draft” gear by clicking in the gray area, and it cuts away the gray where the red gear has to be able to move freely during its movement. If you click the “Exchange” button, the roles reverse: the old gray becomes the new red (which you can add to), a new gray field is established, and fairly quickly, the gray that would interfere with your gear gets cut away. If you wait long enough, it becomes fairly smooth. After a click of “Exchange”, the gears remain in contact with one another throughout their revolution, although not necessarily good contact.
You can also change the gear ratio you’re going for by clicking the buttons labeled with ratios such as “1:3”.


I used this program to 3-D print a couple of gears on a Prusa Mendel, and they seem to mesh pretty well when I try them by hand, although I haven’t mounted them to see if they really work. The process, which I clearly need to streamline because it took me like an hour in all, was as follows:
linear_extrude(height=3) import("foo.dxf");
, where foo.dxf is the name of the
DXF file containing one of the polygons. Actually I
think height=6 would have been a better
idea. With my pipeline, the units are, by default,
millimeters, so in theory that’s 3mm high, but it ends
up being a little higher in practice. Because they’re
about 100mm wide, that’s a 30:1 aspect ratio, which
makes the gears kind of prone to flop apart if they’re
not sitting on a flat surface.
Aside from the crudeness of the process above, this code could be greatly improved in its efficiency, among other things by using bounding boxes and strength reduction so that it doesn’t have to do ten million multiplications per second.
{kind=link}
{kind=link}
{kind=link}